![Figure 1: The two sequences for the autocorrelation of x0[n] and x0[n].](https://www.wavewalkerdsp.com/wp-content/uploads/wordpress-popular-posts/5515-featured-125x100.png)







The introductory type of filter encountered in the undergraduate education is the time-invariant (TI) filter. A TI filter is one whose impulse-response does not change with time. Applying the filter against the same signal a nanosecond from now or 15 years from now will produce the same response. A signal x[n] is related to the filter output y[n] through discrete-time convolution,
(1) ![\begin{equation*}y[n] = x[n] \circledast h[n],\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-433f869437bbad0153ee8a5d7a3f82bd_l3.png "Rendered by QuickLaTeX.com")
or equivalently,
(2) ![\begin{equation*}y[n] = \sum_{k=-\infty}^{\infty} x[k]h[n-k],\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-47c804649b70b2d0d5e8d162462f8320_l3.png "Rendered by QuickLaTeX.com")
Delaying a signal x[n] by k samples, x[n-k], and passing it through a time-invariant filter h[n] results in the same delay of the output with no other modifications,
(3) ![\begin{equation*}y[n-k] = x[n-k] \circledast h[n].\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-cccf93d1bfcb66082635925d26260bbc_l3.png "Rendered by QuickLaTeX.com")
There are two types of TI filters; infinite impulse response (IIR) filters which have feedback and finite impulse response (FIR) filters which do not have feedback. A moving average (MA) filter is an example of an FIR filter. Consider a length-3 moving average filter
(4) ![\begin{equation*}y[n] = \left(x[n] + x[n-1] + x[n-2])\right /3,\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-88b063c66bb802d7dc2809395f150b94_l3.png "Rendered by QuickLaTeX.com")
where x[n] is the input signal and y[n] is the output of the MA filter. Each output is the average of the three last inputs. For example,
(5) ![\begin{equation*}y[0] = \left(x[0] + x[-1] + x[-2])\right /3,\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-97aa376c0c02eb5ec56b6d29732e3e5a_l3.png "Rendered by QuickLaTeX.com")
(6) ![\begin{equation*}y[1] = \left(x[1] + x[0] + x[-1])\right /3,\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-05389589acfe89f58d11c1e466c6387a_l3.png "Rendered by QuickLaTeX.com")
(7) ![\begin{equation*}y[2] = \left(x[2] + x[1] + x[0])\right /3.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-39c51bbdd45d43532e9001b2621871ee_l3.png "Rendered by QuickLaTeX.com")
Visually the filter can be represented by the blog diagram in Figure 1.
![Figure 1: A moving average filter is implemented by delaying the input signal x[n] and then scaling by 1/3 and summing all results.](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverageLength3-768x488.png)
Each of the filter weights are 1/3 and the MA filter can be represented by
(8) ![\begin{equation*}h[n] = \begin{cases}1, & n = 0, 1, 2 \\0, & \text{otherwise}.\end{cases}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-ac695a1dfa35fca9e959a4d78bcd57e1_l3.png "Rendered by QuickLaTeX.com")
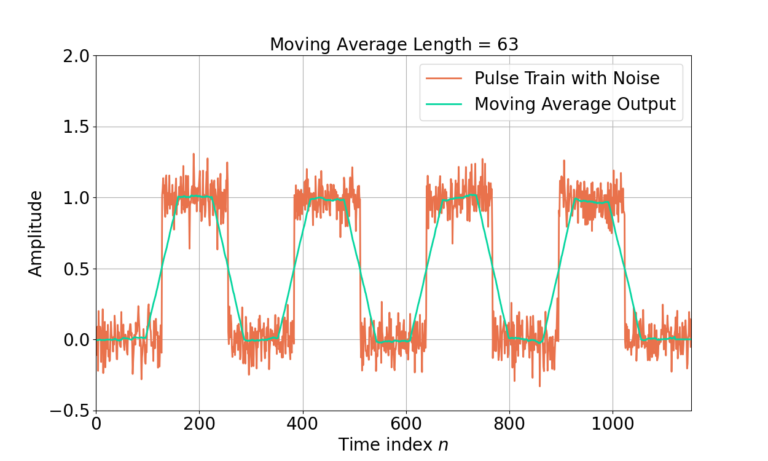
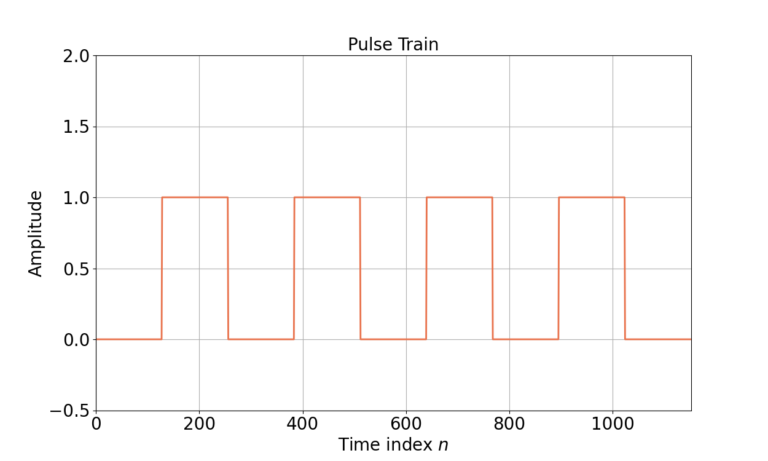
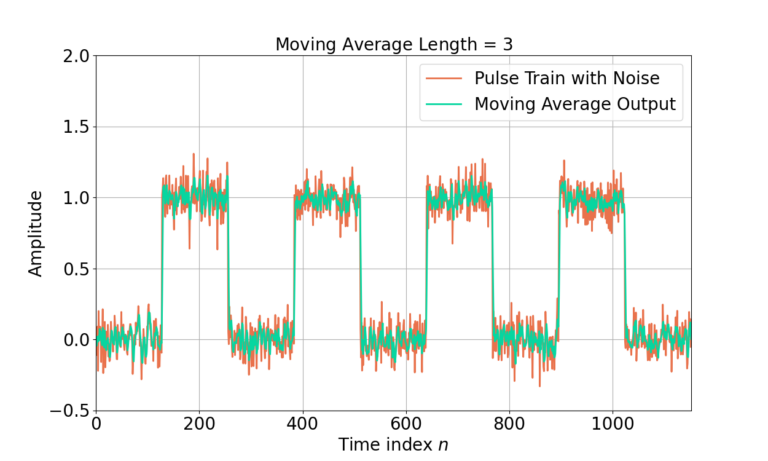
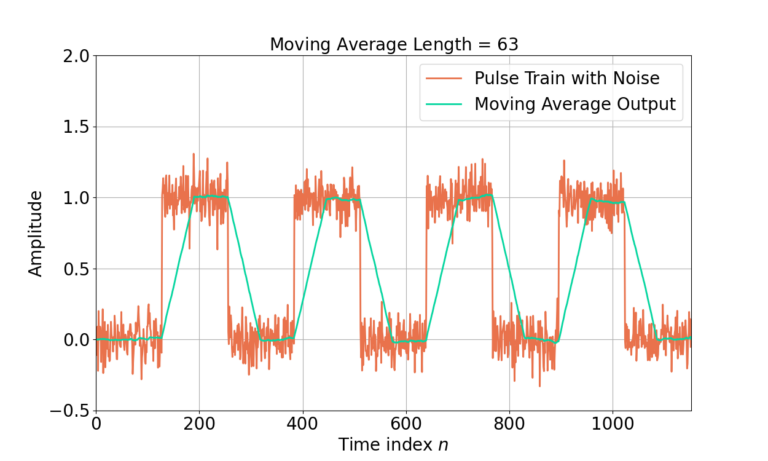
A moving average filter will reduce noise fluctuations in a receive signal. Figure 2 is an example of a pulse train signal. Noise is added to the pulse train and then the length-3 MA filter is applied to reduce the variations in the signal due to noise.
The Z-transform Z{} can be used to translate the difference equation h[n] into the frequency domain H(z),
(9) ![\begin{equation*}Z\{ y[n] \} = Z\left\{ \left( x[n] + x[n-1] + x[n-2] \right) /3 \},\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-9422a23f242bdb92cdbd91d9653de03b_l3.png "Rendered by QuickLaTeX.com")
(10) ![\begin{equation*}Z\{ y[n] \} = Y(z),\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-d2d3c7f767bbabdf05b64c3209627fdc_l3.png "Rendered by QuickLaTeX.com")
(11) ![\begin{equation*}Z\{ x[n-k] \} = X(z) z^{-k}.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-8b9505ff675dbdaad832a7845f4f296a_l3.png "Rendered by QuickLaTeX.com")
Substituting (10) and (11) into (9),
(12) 
Gathering like terms in X(z)
(13) 
allows the transfer function H(z) to be written as
(14) 
Substituting
![\[z=e^{j\omega}\]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-a962f8a36447c278b9af8ff3d10e4622_l3.png "Rendered by QuickLaTeX.com")
into (14),
(15) 
The magnitude-squared response  can by found by
can by found by
(16) 
where * is the conjugation operator. Substituting (15) into (16),
(17) 
Substituting (reference)
![\[cos(\alpha) = (e^{j\alpha} + e^{-j\alpha})/2\]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-dbbf125976b13b597db4fc49f6a798b7_l3.png "Rendered by QuickLaTeX.com")
into (17),
(18) 
and converting into dB,
(19) 
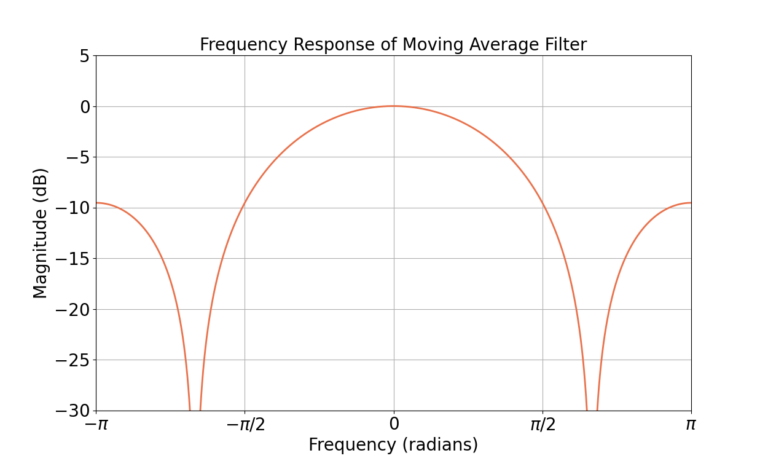
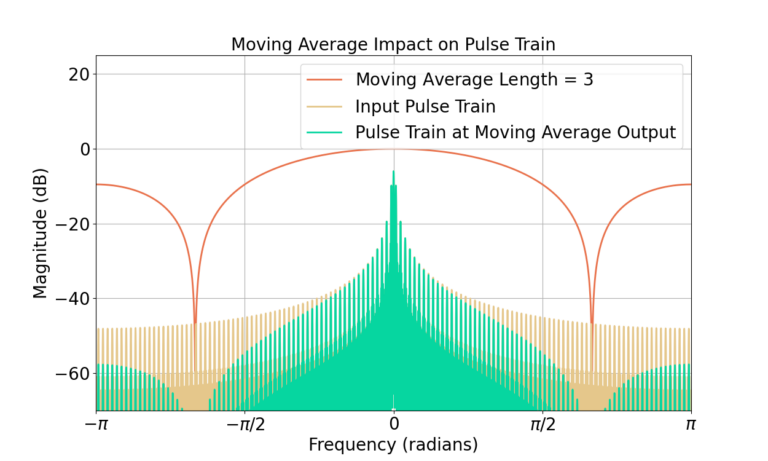
Figure 4 gives the magnitude-squared response of the filter H(z) in dB
The input signal x[n] contains both signal s[n] and noise w[n],
(20) ![\begin{equation*}x[n] = s[n] + w[n].\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-98532eecdd7ae16a2cd8fc8e41a7384d_l3.png "Rendered by QuickLaTeX.com")
The filter h[n] low-pass filters both s[n] and w[n],
(21) ![\begin{equation*}\begin{split}y[n] & = (s[n] + w[n]) \circledast h[n] \\& = (s[n] \circledast h[n]) + (w[n] \circledast h[n]),\end{split}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-6857b039a4475107dd76b9abf97c9ca4_l3.png "Rendered by QuickLaTeX.com")
or equivalently in the frequency domain,
(22) 
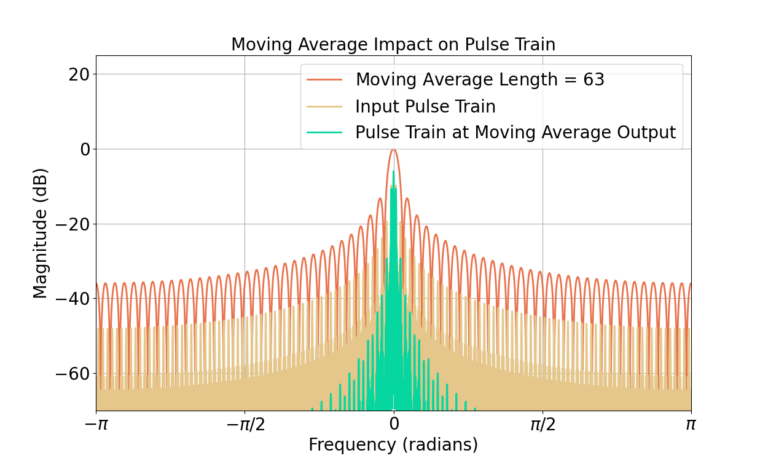
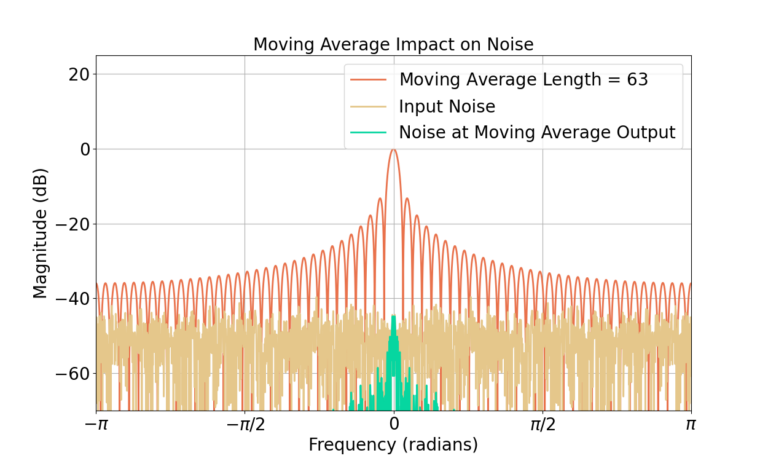
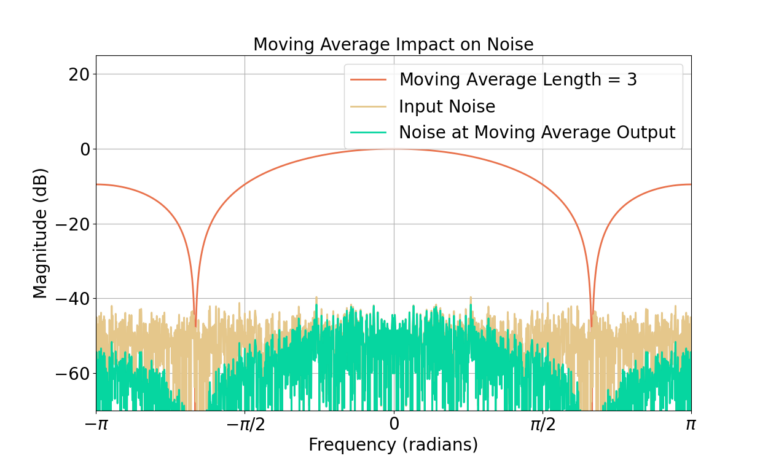
Figure 5 shows how the MA filter reduces the noise at high frequencies in the frequency domain. Similarly Figure 6 shows the frequency response of the pulse train signal is much less effected by the MA filter.
An input signal x[n] is defined to have a single cycle of a pulse,
(23) ![\begin{equation*}x[n] =\begin{cases}1 & 1 \le n \le 7 \\0 & \text{otherwise}. \\\end{cases}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-601c2a23547949976299137d097ebd0b_l3.png "Rendered by QuickLaTeX.com")
Figure 8 demonstrates the starting values for all elements in the block diagram.
![Figure 8: The starting state of the MA filter when x[n] = 0 for n](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverageLength3_input000-768x488.png)
![Figure 9: The state of the filter at n=1 when x[1] = 1.](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverageLength3_input001.png)
![Figure 10: The state of the filter at n=2 when x[2] = 1.](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverageLength3_input011-768x488.png)
![Figure 10: The state of the filter at n=1 when x[1] = 1.](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverageLength3_input111-768x488.png)
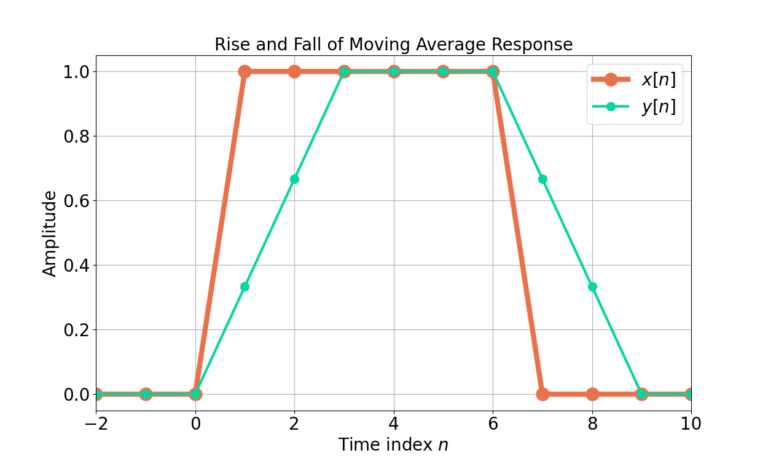
![Figure 13: The filter output y[n] has been realigned with the input x[n] by removing 1 sample of delay.](https://www.wavewalkerdsp.com/wp-content/uploads/2021/09/movingAverage_riseFallDelay-768x461.png)