![A BPSK signal s[n], real Gaussian noise w[n], and the received signal x[n] = s[n] + w[n] for SNR = 20 dB](https://www.wavewalkerdsp.com/wp-content/uploads/wordpress-popular-posts/15621-featured-125x100.png)






Today’s DSP Wisdom: odd-lengths are preferable to even-lengths in an FIR filter.
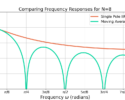
Powers of 2 are ubiquitous in DSP: binary number representations are in base-2, 3 dB is  , and modulations are powers of 2 (BPSK, QPSK, 8-PSK, 16-QAM). The radix-2 FFT is decomposed into 2-input, 2-output butterflies. Upsampling or decimation by 2 can be done efficiently with a half band filter.
, and modulations are powers of 2 (BPSK, QPSK, 8-PSK, 16-QAM). The radix-2 FFT is decomposed into 2-input, 2-output butterflies. Upsampling or decimation by 2 can be done efficiently with a half band filter.
I’ve been allured many times by the siren song of choosing DSP parameters solely because they are powers of 2. A natural fallout is I have typically chosen even parameters for things such as filter lengths because they divide cleanly by a power of 2. The downside is that selecting parameters based on ease of coding results can result in unintended consequences in the DSP.
In this example choosing an even length filter incorporates a fractional time delay at the output of the filter which can negatively effect systems which require precise sampling such as sampling symbols from a demodulator or synchronizing a correlation peak to reference signal.
More blogs on FIR Filters:
A motivating example on the usefulness of odd-length FIR filters is taking a 3-point moving average over a sequence of integers from 0 to 16. The 3-point moving average filter is defined by
(1) ![\begin{equation*}h_{3}[n] = \left[ \frac{1}{3}, \frac{1}{3}, \frac{1}{3} \right]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-44145d85bca1642ec3821f926880ce3e_l3.png "Rendered by QuickLaTeX.com")
and the integer sequence
(2) ![\begin{equation*}x[n] = \left[ 0, 1, 2, ~ \dots ~, 14, 15, 16 \right].\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-e5c9c0e3fa529c3edde4fa7096f790c9_l3.png "Rendered by QuickLaTeX.com")
Figure 1 is the result of the convolution
(3) ![\begin{equation*}y_{3}[n] = x[n] \ast h_{3}[n].\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-15cd427176dd81e22ece606ac237e5d2_l3.png "Rendered by QuickLaTeX.com")
![Figure 1: The convolution of the moving average filter h3[n] with the sequence of integers x[n].](https://www.wavewalkerdsp.com/wp-content/uploads/2021/11/oddLengthFilters_movingAverageLength3Convolve-2-768x576.png)
Figure 1 shows a delay of 1 sample in the convolution output. The convolution takes a certain number of samples before it starts producing valid outputs due to the time it takes to ramp up and store enough samples in the tapped delay line. The output delay for an even-symmetric FIR filter can be calculated by [lyons2011, p.212]
(4) 
where  is the filter length. For a 3-point moving average filter
is the filter length. For a 3-point moving average filter  the output delay is
the output delay is
(5) 
which is the same delay as in Figure 1.
The tapped delay line  is initialized with all zeros,
is initialized with all zeros,
(6) 
The multiplication of  with the filter weights initially results in zero,
with the filter weights initially results in zero,
(7) 
The first input sample x[0] is added to the delay line
(8) ![\begin{equation*}\mathbf{d} = \left[ 1, 0, 0 \right]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-57aee91d8d8f94aa93a4384170a59592_l3.png "Rendered by QuickLaTeX.com")
and the filter output is
(9) ![\begin{equation*}y_{3}[0] =\begin{bmatrix}1/3 \\1/3 \\1/3\end{bmatrix}\begin{bmatrix}1, 0, 0\end{bmatrix} = 1/3.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-c6a1fad3c0ba39e941fa6355137bbab6_l3.png "Rendered by QuickLaTeX.com")
The second input sample x[1] is added to the delay line
(10) ![\begin{equation*}\mathbf{d} = \left[ 2, 1, 0 \right]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-5ad93e4d8ef0143b38a72006a57010ce_l3.png "Rendered by QuickLaTeX.com")
and the filter output is
(11) ![\begin{equation*}y_{3}[1] = \begin{bmatrix}1/3 \\1/3 \\1/3\end{bmatrix}\begin{bmatrix}2, 1, 0\end{bmatrix} = 1.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-f55f95849734c1054c4f1eb604ca912f_l3.png "Rendered by QuickLaTeX.com")
The third input sample x[2] is added to the delay line
(12) ![\begin{equation*}\mathbf{d} = \left[ 3, 2, 1 \right]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-2c52e9db34ea3b692bbf0b5edd6d6a1d_l3.png "Rendered by QuickLaTeX.com")
and the filter output is
(13) ![\begin{equation*}y_{3}[2] = \begin{bmatrix}1/3 \\1/3 \\1/3\end{bmatrix}\begin{bmatrix}3, 2, 1\end{bmatrix} = 2.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-ca909ee02055ee880e9e6f2f2721455b_l3.png "Rendered by QuickLaTeX.com")
After a delay of 1 sample the filter produces valid outputs, ![y_{3}[n]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-859bf8dd0884c8f86eaa7e54baaa9f59_l3.png "Rendered by QuickLaTeX.com") for
for  , as shown in (11) and (13).
, as shown in (11) and (13).
Just as the convolution has a number of samples associated with ramp up it will have a similar ramp down. The delay (4) at the start of the input sequence came from samples needing to ramp up in the tapped delay line. Similarly a ramp down occurs as input samples are leaving the tapped delay line and being replaced with zeros.
It takes samples for the tapped delay line to be flushed and from (4)  samples can be removed from the head of convolution leaving
samples can be removed from the head of convolution leaving
(14) 
samples to be removed from the tail end of the convolution.
 ,
,  the head delay from (
the head delay from (

![y_{3}[n+1]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-8c0b3c33a52e669ee1324495c5f5ba23_l3.png "Rendered by QuickLaTeX.com") as displayed in Figure 2.
as displayed in Figure 2.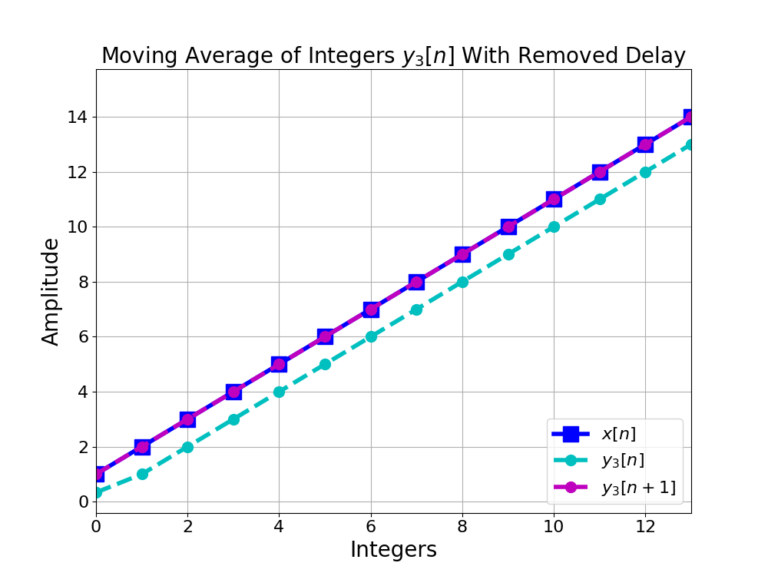
A 4-point moving average filter ![h_{4}[n]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-236188ac9e63e096b77277a0c12c90d5_l3.png "Rendered by QuickLaTeX.com") is convolved with the integer sequence x[n],
is convolved with the integer sequence x[n],
(17) ![\begin{equation*}y_{4}[n] = h_{4}[n] \ast x[n]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-3c4ca12434b6cf3322e36f70406b264f_l3.png "Rendered by QuickLaTeX.com")
which is displayed in Figure 3.
![Figure 3: The convolution of a 4-point moving average FIR filter h4[n] with an integer sequence x[n].](https://www.wavewalkerdsp.com/wp-content/uploads/2021/11/oddLengthFilters_movingAverageLength4Convolve-1-768x576.png)
A delay is seen in the filter output ![y_{4}[n]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-5556fc876ae2fb5c64725d60f72e85e3_l3.png "Rendered by QuickLaTeX.com") in Figure 3 similar to the 3-point moving average in Figure 2. However from (4) the delay is
in Figure 3 similar to the 3-point moving average in Figure 2. However from (4) the delay is
(18) 
which is not an integer number of samples. Figure 4 shows the filter output after removing delays by 1 and 2 samples, ![y_{4}[n+1]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-49e8749ffc812e1e784a9f9fd7b4d7e2_l3.png "Rendered by QuickLaTeX.com") and
and ![y_{4}[n+2]](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-f99aed3cc1e138467110af40c1c09892_l3.png "Rendered by QuickLaTeX.com") .
.
![Figure 4: The non-integer delay from h4[n] cannot be corrected for by removing a 1 or 2 sample delay as in y4[n+1] or y4[n+2].](https://www.wavewalkerdsp.com/wp-content/uploads/2021/11/oddLengthFilters_movingAverageLength4ConvolveNoDelay-1-768x576.png)
Where the delay-corrected 3-point moving average filter in Figure 2 overlaps perfectly with the input sequence the 4-point moving average filter in Figure 4 has introduced a non-integer sample delay as in (18) that can’t be corrected by removing 1 or 2 samples. Figure 4 shows that and straddle the input x[n] due to the non-integer sample delay.
The non-integer sample delay may become a problem in some applications.
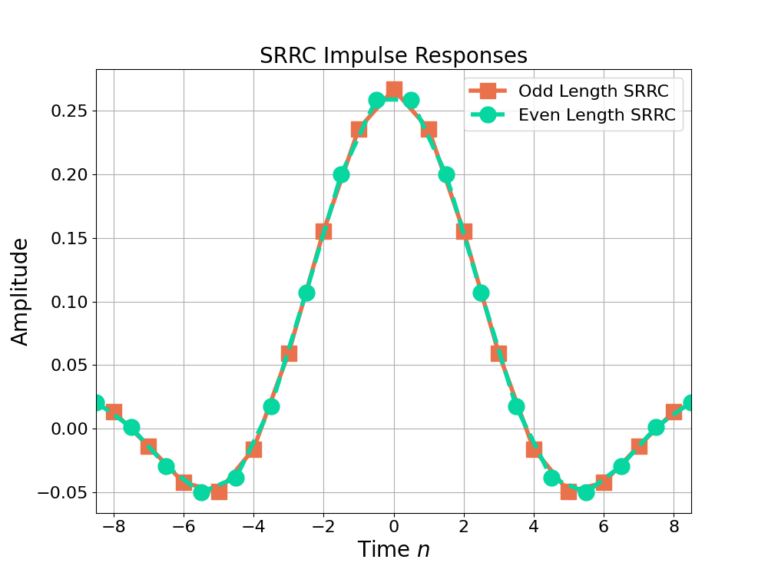
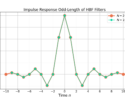
The SRRC parameters between the even and odd length SRRC in Figure 5 are identical except that for the time-indexing: the even length filter is designed with non-integer time values. The even length filter does not have the same peak at  as the odd length filter at n=0. The result is that the receiver with an even length SRRC filter in it will always have a non-optimal sampling time because it cannot sample the peak at n=0.
as the odd length filter at n=0. The result is that the receiver with an even length SRRC filter in it will always have a non-optimal sampling time because it cannot sample the peak at n=0.
You may have noticed that MATLAB’s rcosdesign() function will always give you an odd length. This is why!